

¿Qué debo saber para empezar a trabajar con este recurso?
Niveles a los que va dirigido.
2º Ciclo Educación Infantil y 1º Ciclo Educación PrimariaAsignatura/s:
Todas, depende de los contenidos curriculares incluidos en la actividad.¿Se requieren conocimientos previos? ¿cuáles son?
No se requieren conocimientos previos. Se recomienda que el profesorado se informe de la funcionalidad visual del alumnado y así poder crear materiales más adecuados a sus problemáticas visuales. Sería aconsejable el conocimiento previo del sistema braille o el código ColorADD (http://www.coloradd.net/) si presentan acromatopsia. En cualquier caso, siempre se pueden asesorar por profesionales de la ONCE.¿Qué objetivos se persigue con el recurso?
- Sensibilización. Inclusión. Visibilizar la discapacidad visual.
- Crear materiales adaptados y accesibles.
- Con el alumnado con pérdida total de visión, además se trabajan la discriminación táctil, el braille y la orientación espacial.
¿Qué ventaja obtengo de utilizar este recurso en el aula?
- Accesibilidad, inclusión. Materiales no son exclusivos, sirven para todo el alumnado.
- Trabajar la resolución de problemas, la toma de decisiones y el trabajo colaborativo
¿Qué habilidades de los alumnos desarrollo que no se pueden obtener de manera más tradicional?
- Ponerse en el lugar del “otro”.
- Visibilizar la discapacidad visual.
- Otra forma de jugar empleando el tacto.
¿En qué consiste el recurso?
- Cómo introducir el pensamiento computacional y la robótica educativa en el alumnado con pérdida total de visión o baja visión.
- Adaptación de actividades para alumnado con discapacidad visual.
Y ahora que sé para que sirve, ¿cómo lo pongo en práctica?
Es importante saber cómo “ve” el alumnado con discapacidad visual y así poder “ponernos en su lugar”.¿Qué materiales necesito para ponerlo en práctica en el aula?
Gafas de simulación, robots de suelo y tableros con actividades para trabajar con estos.Orientaciones para la adaptación de tableros para robots de suelo para alumnado con discapacidad visual
Muchos de los tableros que se usan en los centros educativos no presentan grandes complicaciones de adaptación (basta con seleccionar imágenes y fuentes sencillas y bien contrastadas, delimitar las celdillas, etiquetar texto en braille, etc.), aunque no están pensados para que el alumnado con discapacidad visual pueda interactuar con ellos. A continuación, se exponen unas orientaciones a tener en cuenta cuando se trabaje con alumnado con discapacidad visual.- Realizar una descripción verbal y exploración táctil de los materiales a utilizar: robot, tablero y sus elementos.
- Mientras se realiza la descripción verbal, se deberá guiar sus manos e incidir en los detalles importantes para la ejecución de la actividad.
- La exploración táctil deberá ser lenta y suave con la presión justa y con las manos distendidas conservando el tono muscular adecuado en cada momento, utilizando movimientos variados que se ajusten al objeto. Protagonismo de los dedos índice, medio y pulgar al tactar. Organización y sistematización en la exploración, empezar con una exploración general y continuar con la descripción de los detalles.
- Proporcionar puntos de referencia: parte delantera del robot, celda de salida, dirección del desplazamiento…
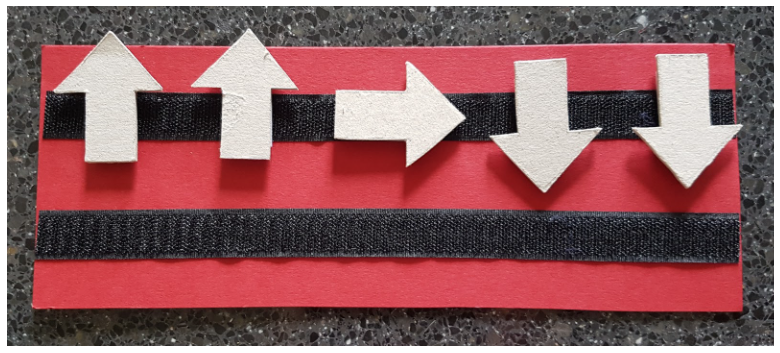
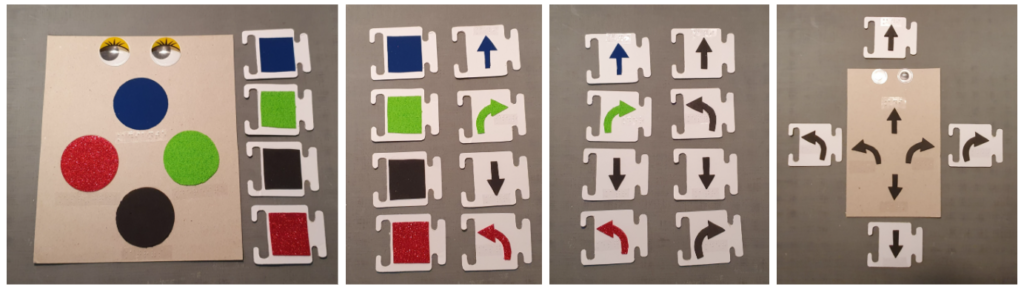
- Si fuese necesario poner referencias en el robot o fichas de programación, es mejor empezar con marcas bien diferenciadas y de formas sencillas: puntas de flecha para las direcciones, ojos indicando la parte delantera del robot, etc., y más adelante continuar con marcas en braille.
- Comenzar por tableros pequeños, abarcables con sus brazos y, poco a poco, aumentar el número de filas y columnas.
- En cuanto a los elementos u objetos de los tableros, al principio se deberán introducir tableros con pocos elementos (poco saturados), incluso dejar celdas vacías. Es recomendable que los elementos ocupen toda la celda, para facilitar el tacto y la comprensión. A medida que el usuario avanza en la adquisición de habilidades, se introducen más elementos.

- Las celdas deberán estar bien delimitadas con marcas en relieve. Cuando el alumno adquiera más destreza, se puede introducir el concepto de “combinar celdas” tanto en vertical como en horizontal. En ese caso, no será necesario delimitar las divisiones internas de dichas celdas.
- En tableros de texturas, se recomienda comenzar por texturas básicas muy diferenciadas entre sí (fieltro, corcho, cartón rugoso…) para ir introduciendo otras, hasta llegar a las más “desagradables” para el tacto (lija y velcro duro, por ejemplo). Se deberán verbalizar el nombre y las propiedades de las texturas al mismo tiempo que se exploran.
- Es mejor trabajar con objetos reales, o lo más parecidas a la realidad, que con reproducciones. Si trabajamos con reproducciones, hay que tener en cuenta la escala, por ejemplo, no elegir una manzana de mayor tamaño que una piña.


- Los materiales a usar en las celdas de los tableros no deben ser muy altos ya que no les permitirían tocar, de forma cómoda, la celda que está detrás.

- Todo lo que se coloque sobre un tablero debería estar adherido o, en caso de tratarse de piezas móviles, sujetas con cinta adhesiva de doble cara o velcro para que no se desplacen cuando las manos del alumno están explorando.

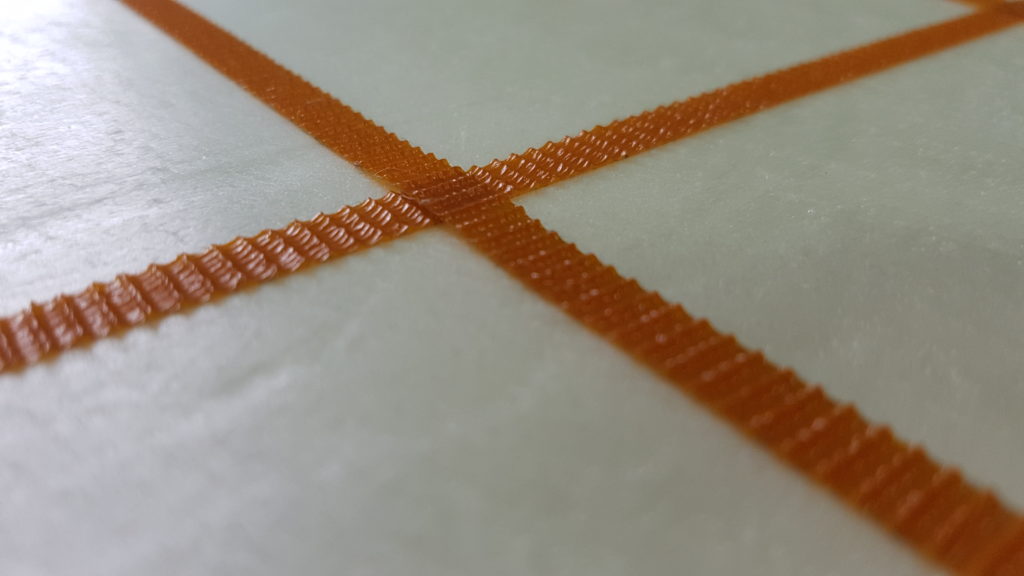
- En tableros con colores y textos con alumnado con baja visión, hay que tener en cuenta el tipo de fuente y los contrastes de los colores. Se recomiendan fuentes sencillas tipo Arial, Tahoma o Verdana. En cuanto a contrastes (Figura 1), se muestran ejemplos de buenos contrastes en color de texto y fondo.
Figura 1. Ejemplos de buenos contrastes.

- Si el tablero está directamente señalizado en el suelo, se recomienda empezar trabajando con una copia en tamaño reducido, más manejable, para percibirlo en su totalidad y después trabajar en el suelo.
- En cuanto a los materiales de los tableros, existen múltiples opciones: cartulina, fieltro, alfombrilla enrollable, vinilo, cartón pluma, porexpán, madera, encajables tipo puzzle, metal con piezas imantadas, tela, papel plastificado, etc. Todos ellos tienen ventajas e inconvenientes, aunque se recomienda que estén elaborados con materiales ligeros, fáciles de transportar y que no sean frágiles, ya que deberán soportar, además del transporte, la exploración manual.
- Para estudiantes sin resto visual funcional, los tableros con fundas o bolsillos de plástico en los que se introducen tarjetas, no son válidos ya que no percibirán los relieves de las tarjetas ni el texto en braille.
Metidos en faena
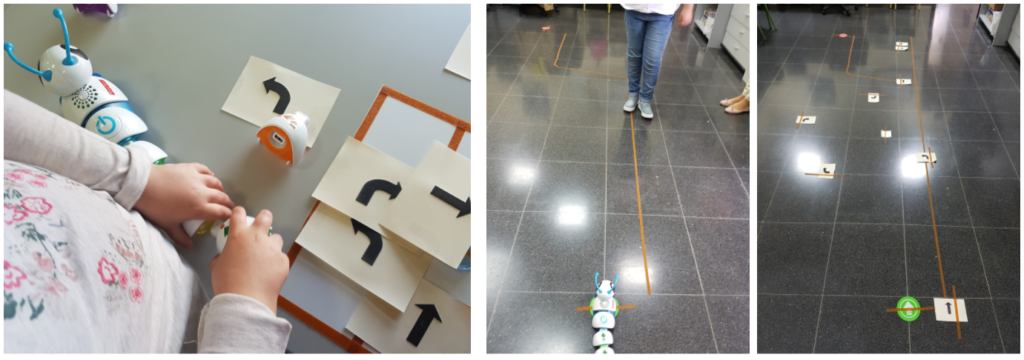
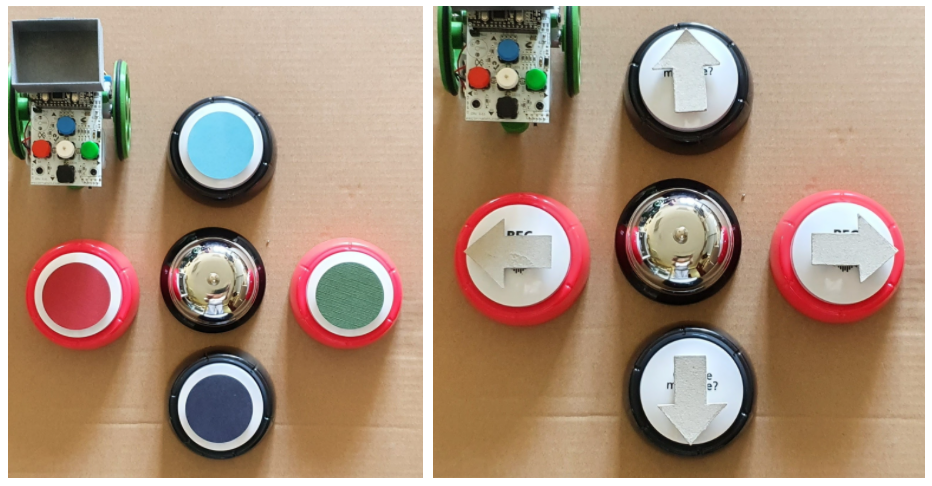
- Empezar trabajando por parejas de forma “unplugged”, un alumno se encarga de dar las órdenes y otro simula ser un robot y así interioriza sus movimientos. Podemos trabajar con un tablero gigante de suelo y emplear pulsadores con mensajes pregrabados “adelante”, “atrás”, “gira a la derecha”, “gira a la izquierda”.

- Para interiorizar la realización de los giros de 90º, el alumno con pérdida total de visión extenderá sus brazos y, manteniendo inmóvil uno de ellos, primero moverá el otro brazo un cuarto hacia la dirección del giro y a continuación girará su cuerpo sin mover los brazos.
- Quién se encargue de dar las órdenes al robot, puede ir reflejando la secuencia de pulsaciones, a introducir en el robot, en regletas de comandos.
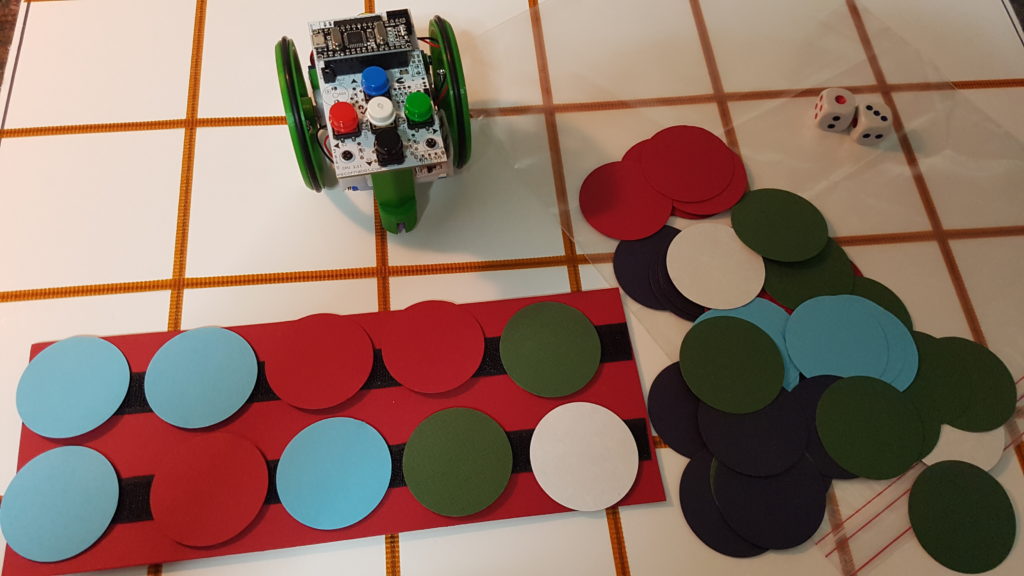
- Interiorizados los movimientos y giros, se trabajará con regletas con códigos de colores, texturas o flechas de movimiento.



- En cuanto a las marcas para la adaptación de robots, muchos poseen botones en relieve y no son necesarias adaptaciones. En aquellos que las marcas no son perceptibles al tacto o no están bien contrastadas, se recomienda poner facilitadores.
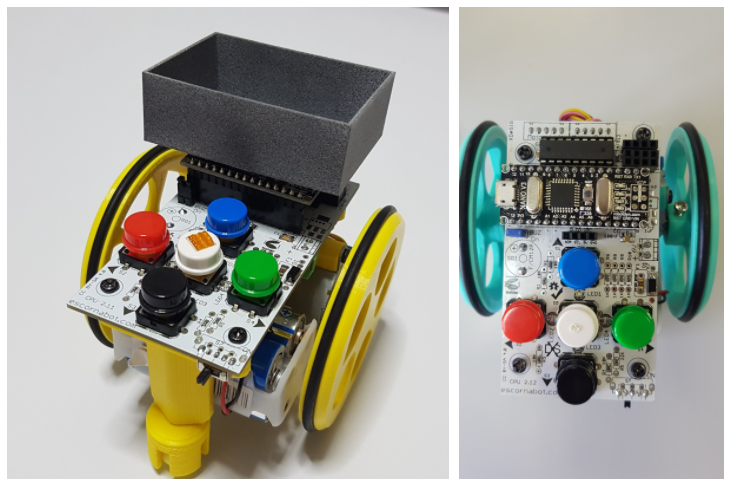


- Otra forma de poner marcas en los robots, es que los alumnos creen disfraces.

- Una vez introducida la secuencia de comandos en el robot, posar su mano suavemente sobre este, con el fin de percibir sus movimientos.

- Cuando empecemos a trabajar con tableros, deberemos explicar bien el objetivo que se persigue con la actividad.
- Informar, verbalmente y guiando su mano, de las variaciones en los tableros o movimientos del robot realizados por el resto del alumnado.
Referencias bibliográficas
- Dirección de Educación, Grupo de Accesibilidad Plataformas Educativas (2005). Pautas para el diseño de entornos educativos accesibles para personas con discapacidad visual. Riberdis. Repositorio Iberoamericano sobre Discapacidad. Madrid: ONCE. Recuperado de: Pautas para el diseño de entornos educativos accesibles para personas con discapacidad visual (cedd.net)
- Carballo, Garrido y Sancho (2015). PequeTiflos, un proyecto inclusivo en Educación Infantil. Integración: Revista digital sobre discapacidad visual, 67, 57-79. Recuperado de: https://www.once.es/dejanos-ayudarte/la-discapacidad-visual/revista-integracion/2015-integracion-65-67/numero-67/67-04-carballo-garrido-sancho-pequetiflos-un.pdf/view
- Garrido Feijoo, R. (2020) Robótica a ciegas. HispaRob. Monográfico “Robótica por la igualdad”, abril 2020, 51-57. Recuperado de: https://robotica-educativa.hisparob.es/wp-content/uploads/2020/04/20-04_Robotica-por-la-igualdad_parte-I.pdf
Enlaces de interés:
- Escornabot. Manejando MuWi con Jaws: https://www.youtube.com/watch?v=SPK9UCEzZ6w
- Escornabot. Manejando MuWi con VoiceOver: https://www.youtube.com/watch?v=uggEN1ySQ6c
- Escornabot. Manejando MuWi con TalkBack: https://www.youtube.com/watch?v=JPLcyNsbmC0