

Docente: Olga Mª Fernández Nava
Curso: 1º de Bachillerato
Asignatura: Tecnología industrial (complemento con TIC)
Objetivos de la propuesta
El objetivo que busca es que el alumnado sea capaz de dar una solución técnicamente viable y económicamente factible a la construcción de un robot cuadrúpedo que se mueva de forma autónoma.
Para ello, deberá aplicar los conocimientos tecnológicos adquiridos durante los años previos y enlazarlos con los nuevos contenidos que se desgranan y amplían durante el curso actual.
Esta actividad se desarrolla para Bachillerato, concretamente para implementarse en Tecnología Industrial I (Tecnología e Ingeniería) en 1º de Bachillerato, ya que pretende contribuir a la adquisición de los siguientes objetivos generales que persigue esta etapa:
Por ser un trabajo a realizar en equipo, ayudará a:
- Consolidar una madurez personal y social que les permita actuar de forma responsable y autónoma y desarrollar su espíritu crítico. Prever y resolver pacíficamente los conflictos personales, familiares y sociales.
- Fomentar la igualdad efectiva de derechos y oportunidades entre hombres y mujeres, analizar y valorar críticamente las desigualdades existentes e impulsar la igualdad real y la no discriminación de las personas con discapacidad.
- Afianzar el espíritu emprendedor con actitudes de creatividad, flexibilidad, iniciativa, trabajo en equipo, confianza en uno mismo y sentido crítico.
La utilización de nuevos dispositivos tecnológicos, ayudará a:
- Comprender la terminología científica para poder emplearla de manera habitual al expresarse en el ámbito científico, así como para explicar dicha terminología mediante el lenguaje cotidiano.
- Comprender los elementos y procedimientos fundamentales de la investigación y de los métodos científicos. Conocer y valorar de forma crítica la contribución de la ciencia y la tecnología en el cambio de las condiciones de vida, así como afianzar la sensibilidad y el respeto hacia el medio ambiente
Además, para el correcto desarrollo de la tarea, es básico el apoyo dado por la materia de TIC, por lo que, con esta actividad, pondremos en práctica los conocimientos, destrezas y aptitudes adquiridos en TIC, y conseguiremos que el alumnado pueda adaptarse con versatilidad a las demandas que surjan en el campo de la tecnología. Se pretende mejorar el pensamiento computacional del alumnado, incluyendo actividades de diseño e impresión en 3D así como de programación de Arduino, fomentando una respuesta robótica final al planteamiento inicial.
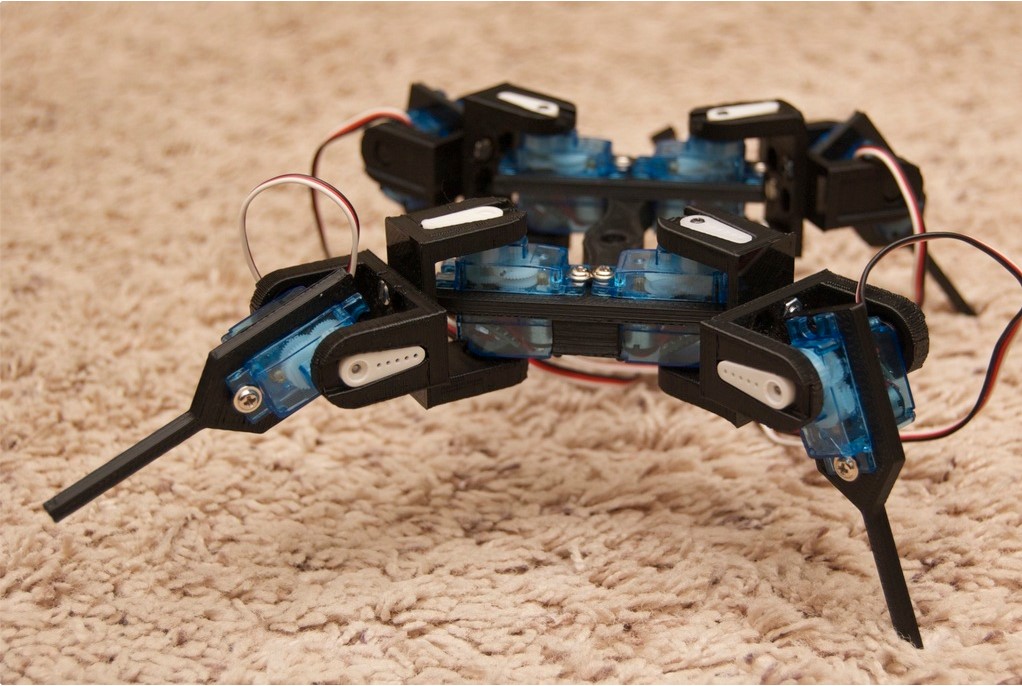
El planteamiento lanzado al alumnado y que constituye el punto de partida de toda la propuesta es el siguiente: Analizar, diseñar y construir una ROBOT CUADRÚPEDO que se mueva cumpliendo los siguientes condicionantes:
- Para las distintas piezas que formen el robot, se podrán emplear: Materiales reciclados de cualquier tipo, desde piezas de cartón (cajas de galletas o de zapatos, rollos de cocina o del papel higiénico…), cartulina, papel, envases de plástico, tapones, palillos, varillas de metal o de madera… Todo aquello que tengamos disponible en nuestras casas. Tableros de madera contrachapada, disponibles en el taller en diversos grosores. PLA para crear las piezas mediante impresión 3D. (ESTA OPCIÓN ES LA QUE SE ESPERA QUE SELECCIONEN, YA QUE EN 1 DE BACHILLERATO LOS PROYECTOS DEBEN SER ESTÉTICAMENTE MÁS PERFECTOS QUE EN CURSOS INFERIORES)
- El tamaño del robot no superará los 50 cm x 50 cm x 50 cm.
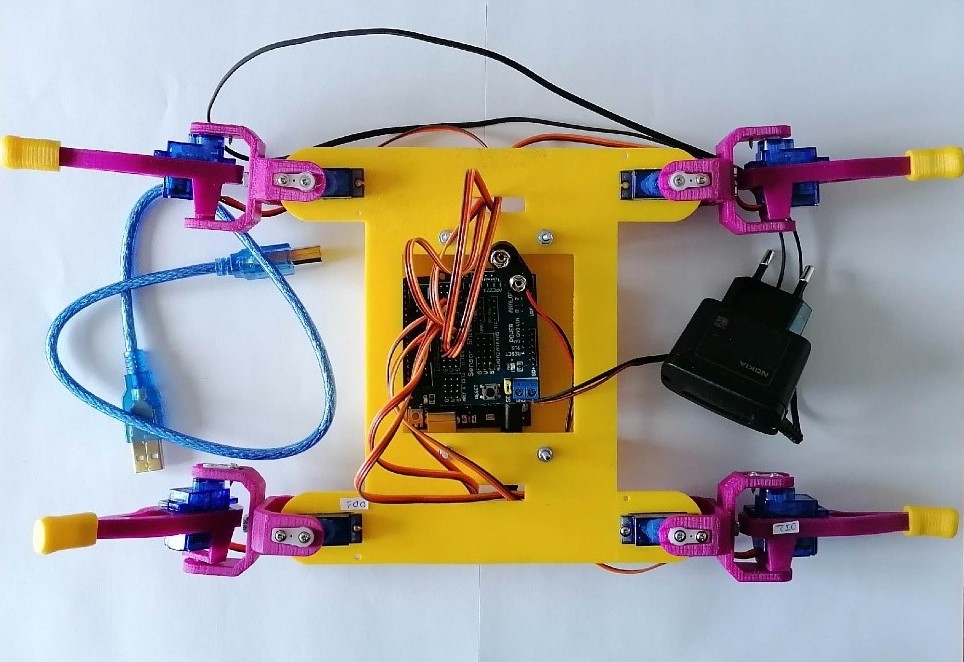
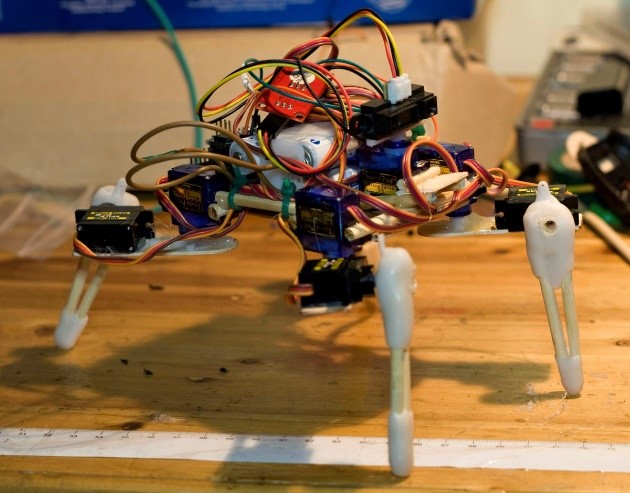
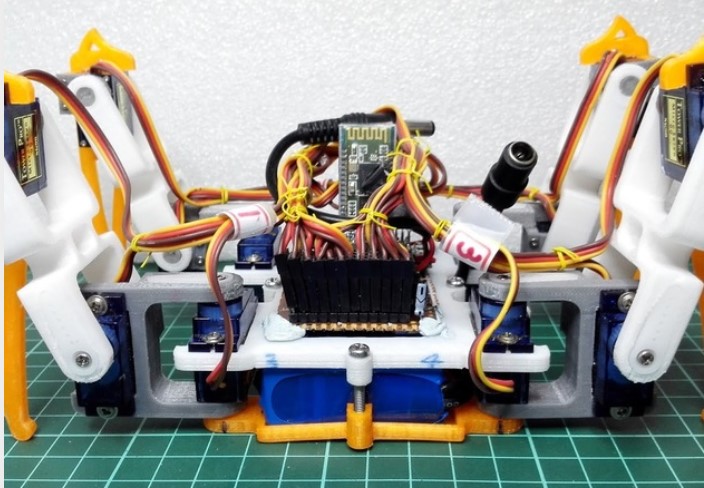
- El robot se moverá gracias a una alimentación de energía (pilas, batería o placa solar).
- El movimiento se conseguirá con la rotación controlada de los dos servomotores que se dispondrán en cada una de sus patas. Estos servomotores serán controlados por un Arduino Uno.
- Una vez construido el robot se podrá decorar para que sea estéticamente atrayente.
- La forma del robot será libre, así como la secuencia de movimientos que se le quiera asignar.
Puede ser un robot que al accionar su interruptor de puesta en marcha:
- Realice una secuencia de movimientos, un baile, por ejemplo,
- Que siga una trayectoria marcada en el suelo,
- Que realice movimientos aleatorios hasta encontrar un obstáculo,
- Que se mueva si detecta una luz,
- Que ejecute las órdenes que le lleguen a través de bluetooth mediante una aplicación creada con App inventor e instalada en nuestro móvil.
- Cualquier otro movimiento que tu imaginación te ofrezca.
Para la realización de este proyecto se seguirá el proceso tecnológico, por lo que, se hará una MEMORIA COMPLETA que documente todas las fases.
A partir de estas premisas y del visionado de videos que resuelven propuestas similares, se da comienzo a la propuesta que seguirá el siguiente ESQUEMA DE DESARROLLO:
- Análisis de la propuesta
- Desarrollo de la memoria del proyecto
- Búsqueda de información
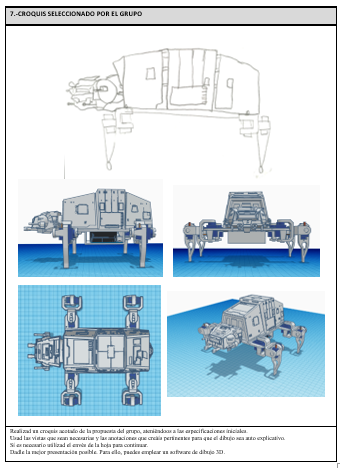
- Diseño de la solución adoptada
- Planificación de la ejecución
- Ejecución
- Comprobación
- Difusión del proyecto
Para que la documentación de la memoria sea completa, se podrá facilitar un modelo de la misma para que los alumnos completen de forma clara y concisa todos sus apartados.
Desarrollo de las sesiones
El número de sesiones que precisa esta propuesta es elevado, ya que engloba todas las fases del proceso tecnológico. Se indica a continuación una descripción de las actividades realizadas en cada sesión, el objetivo buscado en cada una de ellas y la metodología /estrategia utilizada.
Sesión 1
Actividad: Análisis de propuesta de trabajo y explicación de documentos de memoria. Inicio de lluvia de ideas.
Objetivo: Motivar al alumnado para desarrollar con ilusión y ganas este proyecto.
Metodología: Mediante proyector, explicación de la propuesta. Visita a varias páginas web para conocer las aplicaciones online y páginas a utilizar durante el desarrollo del proyecto y a otros enlaces para ver varios robots-araña funcionando.
Sesión 2
Actividad: Búsqueda de información y diseño de la solución adoptada.
El alumnado idea su propio diseño de forma individual y apoyándose en la idea de cada uno, deciden el diseño definitivo del robot: Se determina el material a emplear. (Aquí hay que guiar su decisión hacia PLA para su Impresión 3D).
Objetivo: Definir el aspecto del robot y los materiales a utilizar.
Metodología: El papel del profesor es prácticamente de espectador, ya que solo resuelve dudas de carácter constructivo de los diseños propuestos.
Sesión 3
Actividad: Concreción de la solución adoptada y Planificación de la ejecución.
En esta sesión el alumnado se adentra en el mundo del diseño e impresión 3D y buscan proyectos en Thingiverse que se adecuen a su diseño, descargando las partes que pueden servirles para adaptarlas a su proyecto. El alumnado se reparte las piezas necesarias para avanzar en equipo y comparten archivos a través de Tinkercad para ayudarse en los diseños.
Objetivo: Conocer Tinkercad y Thingiverse.
Metodología: Se explica cómo buscar y descargar en Thingiverse y cómo comenzar a trabajar con Tinkercad.
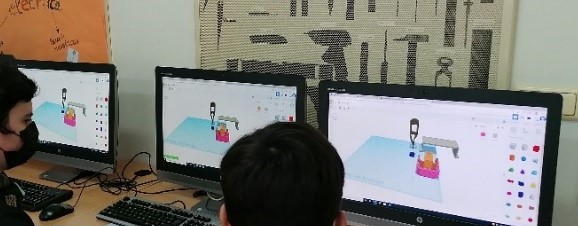
Sesión 4
Actividad: Concreción de la solución adoptada y Planificación de la ejecución. El alumnado trabaja en Tinkercad para crear las piezas del robot.
Objetivo: Manejo de Tinkercad.
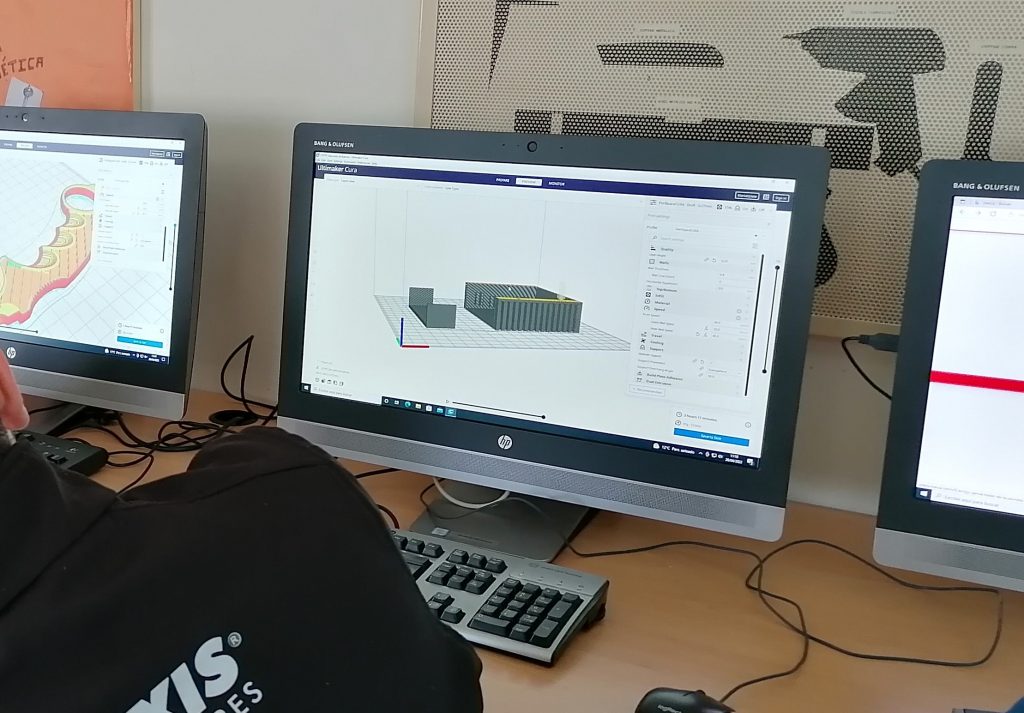
Metodología: Explicación de nuevas acciones con Tinkercad. Guardar como. stl para llevar los archivos al Cura y preparar su impresión.
Sesión 5
Actividad: Concreción de la solución adoptada y Planificación de la ejecución.
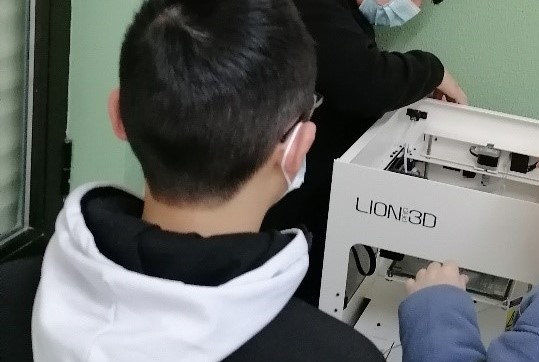
Continuar con el trabajo en Tinkercad e imprimir algunas piezas ya preparadas. (Este paso precisa la preparación previa por parte del profesor de las piezas en el CURA). El alumnado descubre el funcionamiento de la impresora 3D y ven las dificultades que la impresión puede ocasionar debido al tiempo necesario para imprimir las piezas. Deben revisar los diseños para que sean factibles.
Objetivo: Imprimir primeras piezas del robot y continuar con el diseño en Tinkercad: Mejorar la impresión 3 d de las piezas.
Metodología: Apoyo en la utilización del Tinkercad y explicación del funcionamiento de la impresora 3D. Primer acercamiento a ella.
Sesión 6
Actividad: Ejecución. Se reparten tareas para avanzar en equipo. Se continúa con el diseño y adaptación de piezas, se realizan los planos de despieces y se comienza a digitalizar el documento de la memoria, planificando y concretando cada tarea a cada alumno. Además, se continua con la impresión de piezas y se introducen contenidos de los dispositivos electrónicos que van a utilizar y de Arduino.
Objetivo: Avanzar en el proyecto y acercamiento a dispositivos electrónicos como introducción al bloque de programación.
Metodología: Supervisión del trabajo y explicación de dispositivos electrónicos.

Sesión 7
Actividad: Ejecución. Se finaliza la fase de diseño y se preparan las piezas que faltan en el CURA para llevarlas a impresión.
Objetivo: Finalizar fase de diseño y funcionamiento del CURA.
Metodología: Explicación de funcionamiento del CURA y cómo se realiza su configuración. Adecuación de piezas para que se impriman sin problema: condiciones a cumplir.
Sesión 8
Actividad: Ejecución
Objetivo: Finalizar la impresión de las piezas básicas del robot y repasar todo el trabajo.
Metodología: Se repasa todo el trabajo realizado hasta ahora para asentar conocimientos y afrontar la segunda parte de la propuesta: Movimiento del robot- Programación de Arduino.
Sesión 9
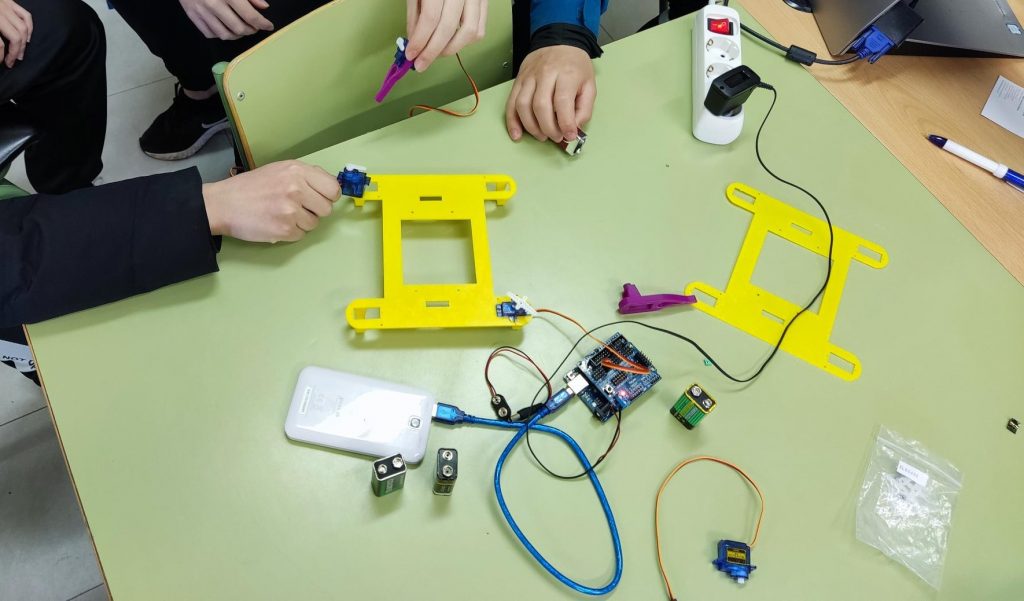
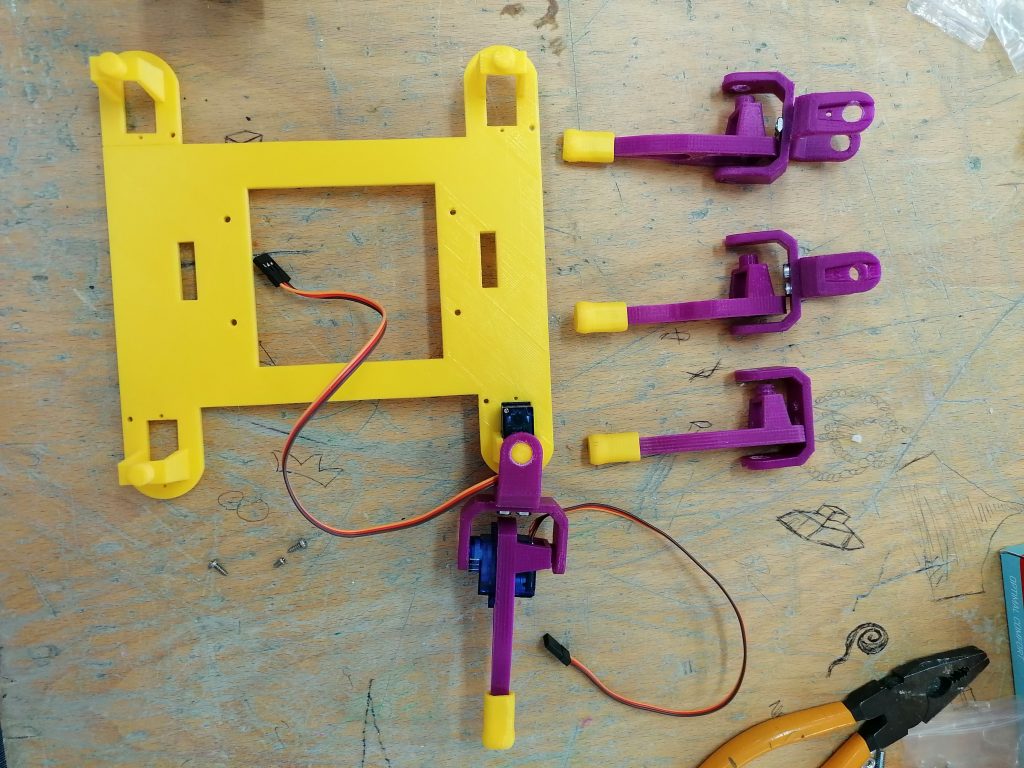
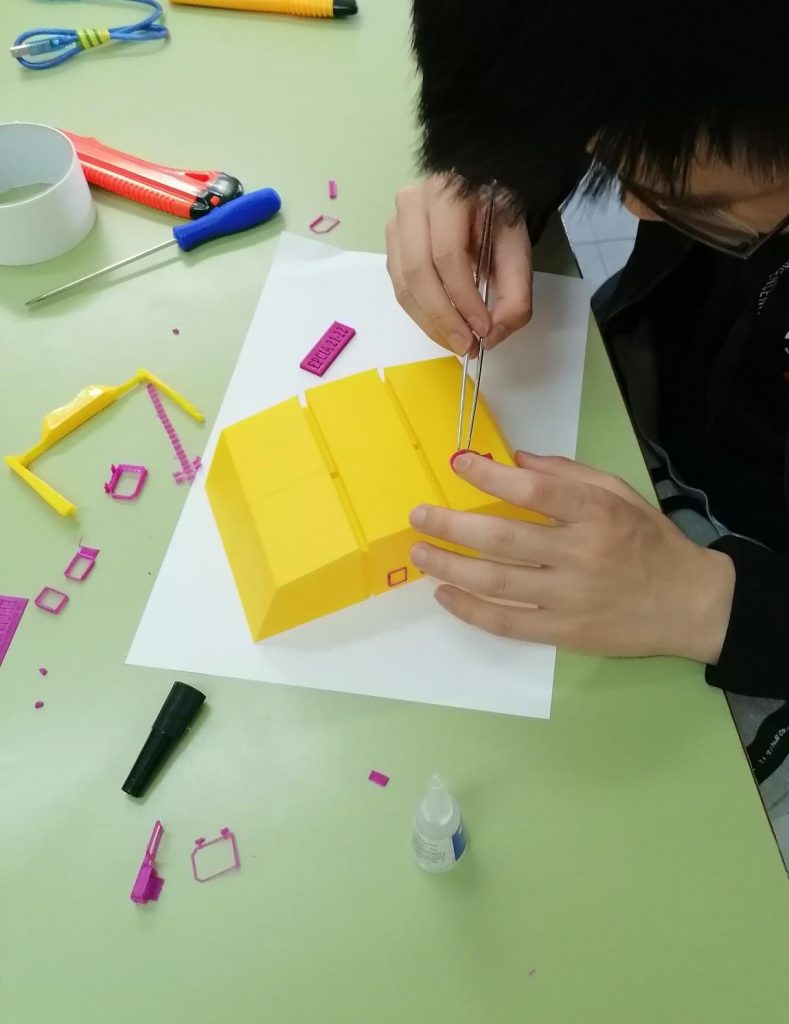
Actividad: Ejecución. Se comienza con la fase de ensamblado de las piezas y elementos mecánicos/electrónicos.
Objetivo: Ensamblar todas las piezas básicas del robot.
Metodología: Ayuda en la explicación del manejo de herramientas y del ensamblado de piezas y conexión de cableado de motores y Arduino.


Sesión 10
Actividad: Programación
Objetivo: Controlar el movimiento de un servo mediante Arduino con dos programaciones diferentes.
Metodología: Explicación de contenidos y realización práctica de las primeras aplicaciones de Arduino.
Sesión 11
Actividad: Ejecución y Programación. Con la parte fundamental del robot ya ensamblada, realizamos la programación de Arduino.
Objetivo: Programar el Arduino para que el robot se mueva: reposo, camina.
Metodología: Se facilita al alumnado dos archivos de ayuda y consulta, que se explican en clase:
- Un esquema con los ángulos de giro permitidos en cada servo según la posición que se le ha asignado a cada uno, para que puedan identificar claramente cómo van a ser sus movimientos.
- Un sketch “medio realizado”, para que, una vez entendido y explicado, puedan realizar las modificaciones sobre él y adaptarlo al robot según sus preferencias de movimientos. En este sketch se indican más procedimientos de los trabajados durante la sesión.
Sesión 12
Actividad: Ensamble final y Difusión del proyecto realizado. Se termina de decorar y ensamblar el robot y se graban los vídeos finales del proyecto.
Se crea un archivo Canva para difundir y dar publicidad a nuestro proyecto. Para ello empleamos una plantilla de Canva como soporte y añadimos fotos, memorias, videos y nuestras impresiones respecto al proyecto. Acceso al recurso: página Canva
También se sube el archivo a la aplicación Calameo para que se pueda ver el documento en modo revista. Acceso al recurso: página Calameo
Esta fase, se realiza con el apoyo de TIC y con la colaboración del DTO de Lengua y Literatura que supervisa su redacción y expresión, fomentando así el trabajo interdepartamental.
Metodología: Apoyo y explicaciones necesarias para finalizar correctamente el ensamblado final. Para la parte de difusión, explicación de la interfaz y las aplicaciones de Canva y Calameo para la elaboración de un archivo promocional de nuestro robot.

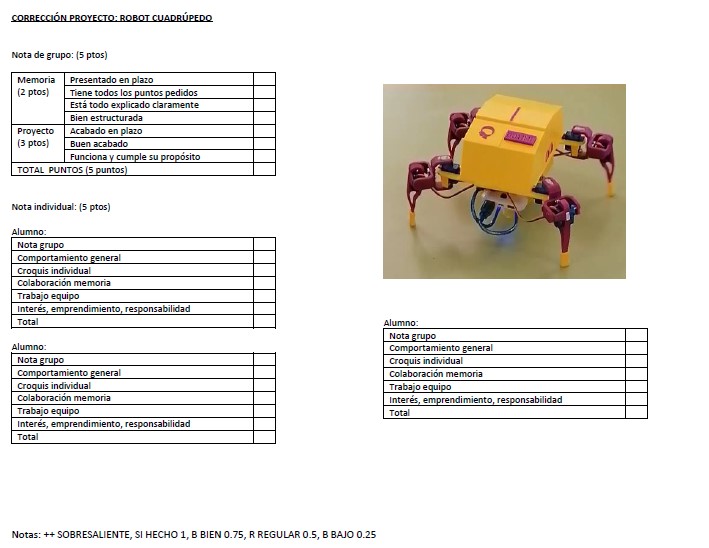
Evaluación
Para llevar a cabo la evaluación del proyecto, he utilizado la plantilla que se indica a continuación, la cual la he ido rellenando con la información que he ido recogiendo a lo largo del desarrollo del proyecto.
La nota obtenida en el proyecto, se ha tenido en cuenta para el cálculo de la nota final del curso, ya que ha sido un proyecto en el que se han incluido contenidos de todo el curso y se ha desarrollado en varios trimestres. Del mismo modo, ha sido fundamental para realizar la evaluación de competencias del alumnado, ya que el trabajo por proyectos permite observar y evaluar las competencias adquiridas por cada alumno.
Reflexión sobre las dificultades encontradas y logros obtenidos
¿Qué dificultades has encontrado durante la implementación de tu propuesta? ¿Qué ha funcionado mejor?
Los problemas que hemos encontrado para la implementación de la propuesta han sido fundamentalmente los siguientes:
- La falta de tiempo para poder desarrollar todo el proyecto con más tranquilidad, sin el agobio de ir deprisa para cumplir los plazos establecidos y poder seguir la programación didáctica de la asignatura para dar todos sus contenidos. Quizá la propuesta es muy osada al incluir diseño, construcción y programación, ya que siempre surgen imprevistos y algunas actividades se alargan más de lo esperado.
- La posible dependencia de personal y servicios externos (técnico de impresora 3 d y la entrega de suministros), por lo que, creo que, en proyectos de este tipo, hay que tener en cuenta estos problemas, que son fáciles de aparecer y tediosos de resolver. Si los problemas que surgen no se resuelven con inmediatez, el alumnado se desmotiva.
¿Qué logros se han alcanzado?
Cuando se tiene un proyecto acabado, y vemos materializado todo nuestro trabajo, siempre nos sentimos muy orgullosos de todo lo que hemos conseguido.
Considero que trabajar con proyectos con el alumnado y vivir con ellos los momentos de explosión de ideas, de superación de obstáculos y de celebración de avances es muy satisfactorio para ambas partes. Creo que esta metodología activa, permite un acercamiento al alumno distinto, más cercano y motivador, que supone aprendizajes para el alumnado y también para los docentes.
He conseguido que el alumnado se acerque a nuevas formas de trabajar, con tecnologías innovadoras como la impresión 3D y el Arduino, nuevos softwares y aplicaciones informáticas y, sobre todo, que disfruten tanto como yo de la tecnología. El primer día de clase me contaban sus inquietudes para ser ingenieros y creo que este proyecto ha dado un empujón a esa vocación que tienen. Además, yo creo que es bueno para el desarrollo intelectual materializar una idea, enfrentándose para ello a retos y dificultades y superarlos todos con éxito logrando el objetivo propuesto.
Por otro lado, al hacer interdepartamental algunas fases del proyecto, el alumnado han valorado la ayuda ofrecida por otros profesores del centro.
Además, una vez difundido el proyecto, el alumnado se ha sentido orgulloso por las felicitaciones recibidas por su trabajo.
Para concluir, quiero destacar, que lo que más me ha gustado de todo el proyecto, se resume en esta frase que el alumnado han puesto en la publicación que realizaron, como final a sus impresiones: Nos entusiasmaría hacer otro proyecto similar en el futuro
¿Cómo crees que podría mejorar la implementación de la propuesta?
Para trabajos futuros, creo que hay que mejorar la implementación de las propuestas no haciéndolas tan ambiciosas, por ejemplo, dando continuidad a un proyecto. Un año se hace el diseño y la construcción del prototipo y para el año siguiente se hace toda la programación. También se podría mejorar, comenzando el proyecto desde inicio de curso, empleando una hora semanal al desarrollo de este tipo de propuestas.
Mejorar, aprender y avanzar. Ese es el objetivo.
Para profundizar
Como referencias empleadas en esta propuesta, merecen especial atención los siguientes enlaces, que han sido los utilizados en la sesión inicial del proyecto:

También los siguientes videos de YOUTUBE:
- https://www.youtube.com/watch?v=BDlAaVu2zdM
- https://www.youtube.com/watch?v=jFxsih5Tp-U
- https://www.youtube.com/watch?v=FUkuHVv7u8Q
- https://www.youtube.com/watch?v=35Y97PPzupg
Y sobre todo: