

Docente: Eva Mª Amador Figueroa
Curso: 2º de Educación Secundaria Obligatoria
Asignatura: Tecnología, programación y robótica
Objetivo de la propuesta
Esta propuesta engloba dos unidades del curso “Máquinas automáticas y robots. Elementos mecánicos y eléctricos de un robot” y “Programación de sistemas electrónicos”, y se plantea para que los alumnos tengan un aprendizaje semi autónomo desarrollado de forma grupal.
Con un enfoque totalmente práctico y atractivo para los alumnos, donde prima crear y jugar, se minimizan los enunciados y las explicaciones por parte del profesor y se potencia el aprender a aprender con actividades en las que deben solucionar los retos propuestos con los conocimientos adquiridos previamente al ver, qué son y cómo funcionan, los diferentes componentes robóticos, desarrollando así las capacidades necesarias para aumentar su autonomía y habilidades de trabajo en equipo.
Se relaciona con los siguientes objetivos del tema:
- Comprender qué es la robótica.
- Conocer la arquitectura de un robot.
- Estudiar distintos tipos de robots, sus características y funciones.
- Identificar las partes de un robot.
- Diseñar un robot con funciones concretas.
- Conocer los elementos mecánicos y eléctricos que intervienen en el movimiento de un robot.
- Entender qué es un sistema de control y las partes que lo componen.
- Utilizar un software de programación para controlar tarjetas Arduino como Bitbloq.
- Crear programas con Bitbloq.
- Diseñar y programar un circuito montado sobre una placa Arduino.
- Realizar actividades guiadas respetando los pasos establecidos.
Los objetivos de desarrollo de competencias digitales son los siguientes:
- Realizar documentos propios con la información obtenida.
- Manejar herramientas digitales para la construcción de conocimiento.
- Actualizar el uso de las nuevas tecnologías para mejorar el trabajo y facilitar la vida diaria.
- Manejar con destreza el sistema operativo de un ordenador y distintas aplicaciones informáticas para buscar, guardar, manejar, exponer, modificar o publicar datos.
Desarrollo de las sesiones

Actividades
Sesión 1: Misión O
Reflexión sobre los conocimientos previos, formación de grupos de trabajo y explicación de la forma de trabajo y evaluación.
MISIÓN 0. Organizan el trabajo de casa: deben buscar información del apartado teórico del tema que les haya tocado y preparar una presentación grupal que expondrán en la siguiente sesión.
Sesiones 2 – 5: Misiones Base
En la sesión 2 se exponen los trabajos de la misión 0 y se resuelven de dudas.
En la sesión 3, y antes de iniciar el trabajo de esta sesión, terminan las exposiciones pendientes.
MISIÓN 1. ACTIVIDAD PARA CLASE: Superar el juego: https://studio.code.org/s/hero

ACTIVIDAD PARA CASA: Resolución de los juegos “laberinto” y “pájaro” de https://blockly.games/?lang=en. Algunos alumnos entregan más juegos ya que les ha gustado este recurso.
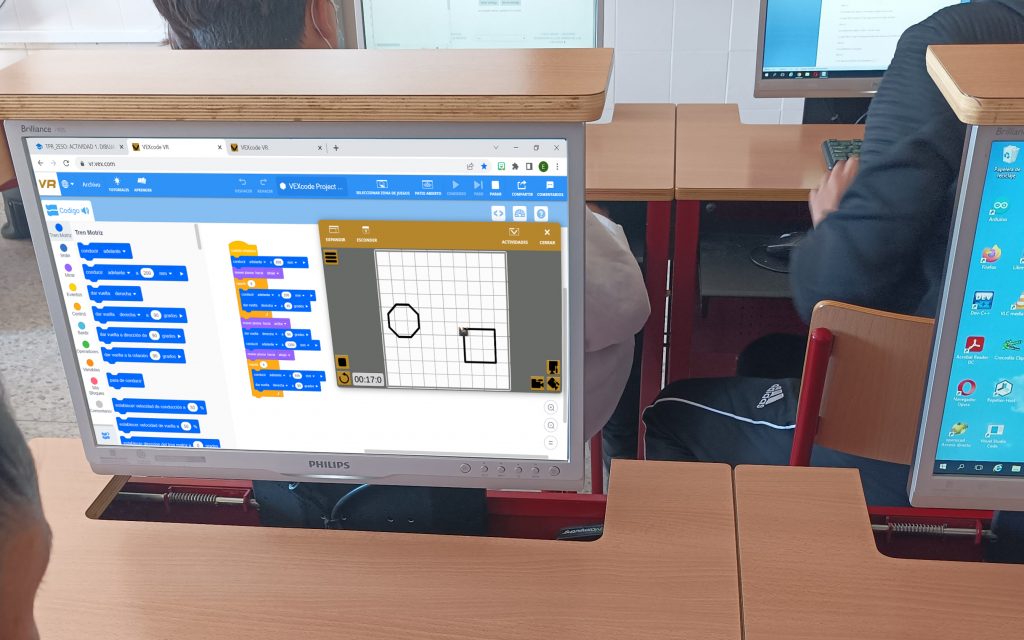
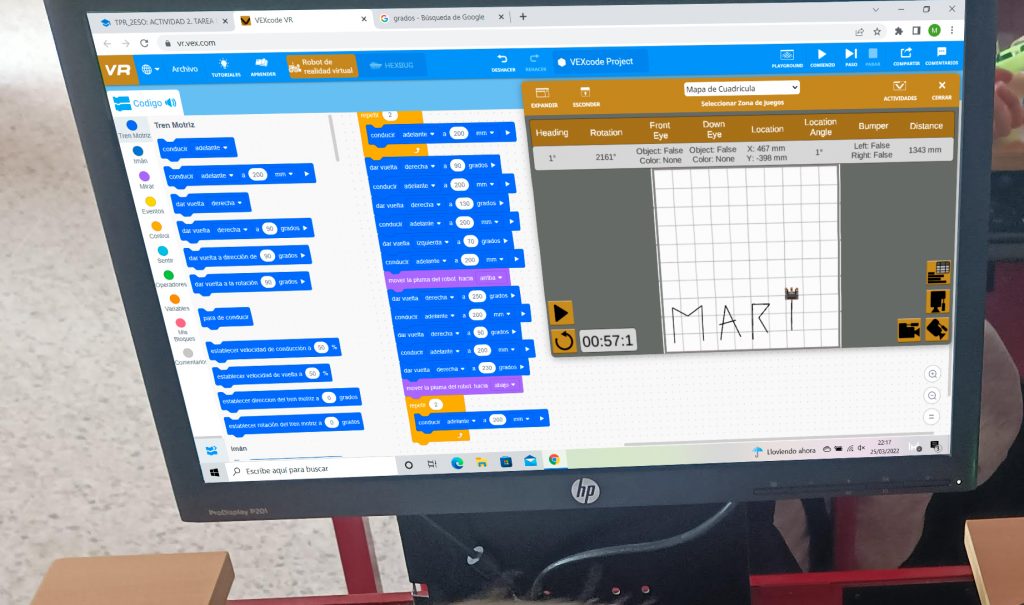
En la sesión 4 se plantean 3 misiones al inicio de la clase y se explica el simulador VR-VEX: https://vr.vex.com/. La primera se debe entregar en 20 minutos en el aula virtual, las otras 2 se pueden acabar en casa.
MISIÓN 2. Superar el máximo número de niveles del juego https://compute-it.toxicode.fr/.

Actividad 2: Limpiamos la ciudad
Al acabar el tiempo pidieron acabarlo, lo que les llevó casi toda la clase, por lo que se les deja otra sesión para acabar las misiones 3 y 4 en lugar de hacerlas en casa.
MISIÓN 3. Dibujar dos polígonos separados y con diferente número de lados en el simulador.
MISIÓN 4. Escribir el nombre en el simulador.
Los que iban acabando las actividades en la sesión 5 pedían más ejercicios:
TAREAS DE AMPLIACIÓN: “Programar el robot para escapar del laberinto de pared dinámico”. “Sois un robot de limpieza marino y tenéis que recoger la mayor cantidad de basura en la zona de juego limpieza del arrecife de coral”.
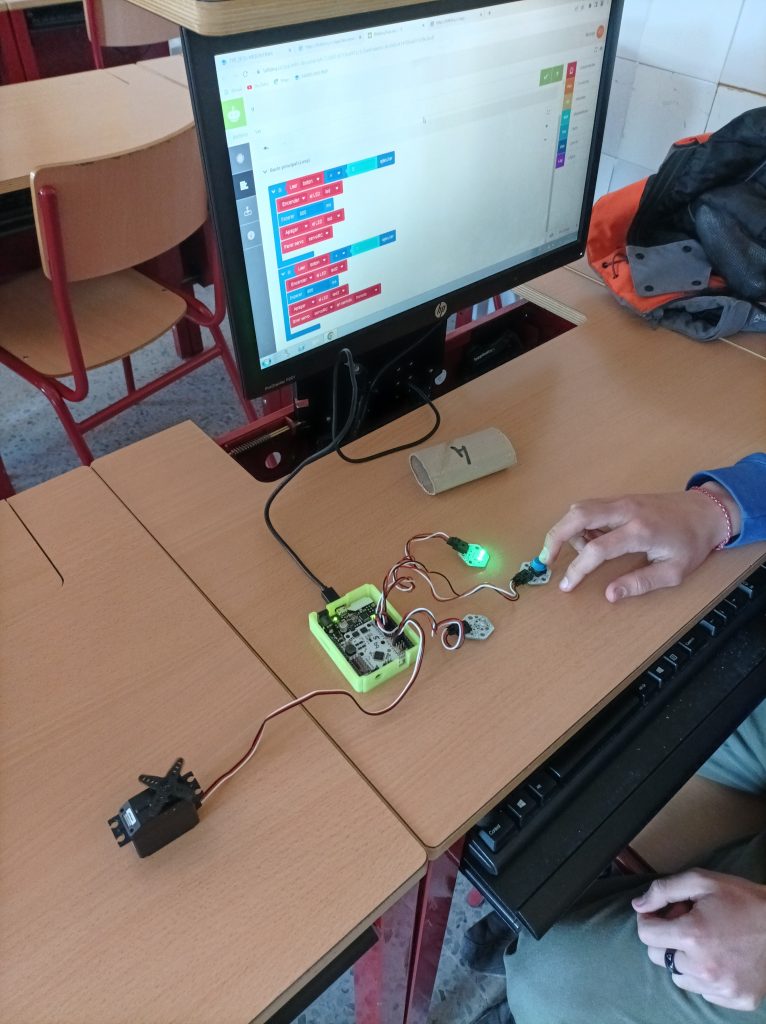
Actividad 6 – 8: Misiones Maqueta Arduino
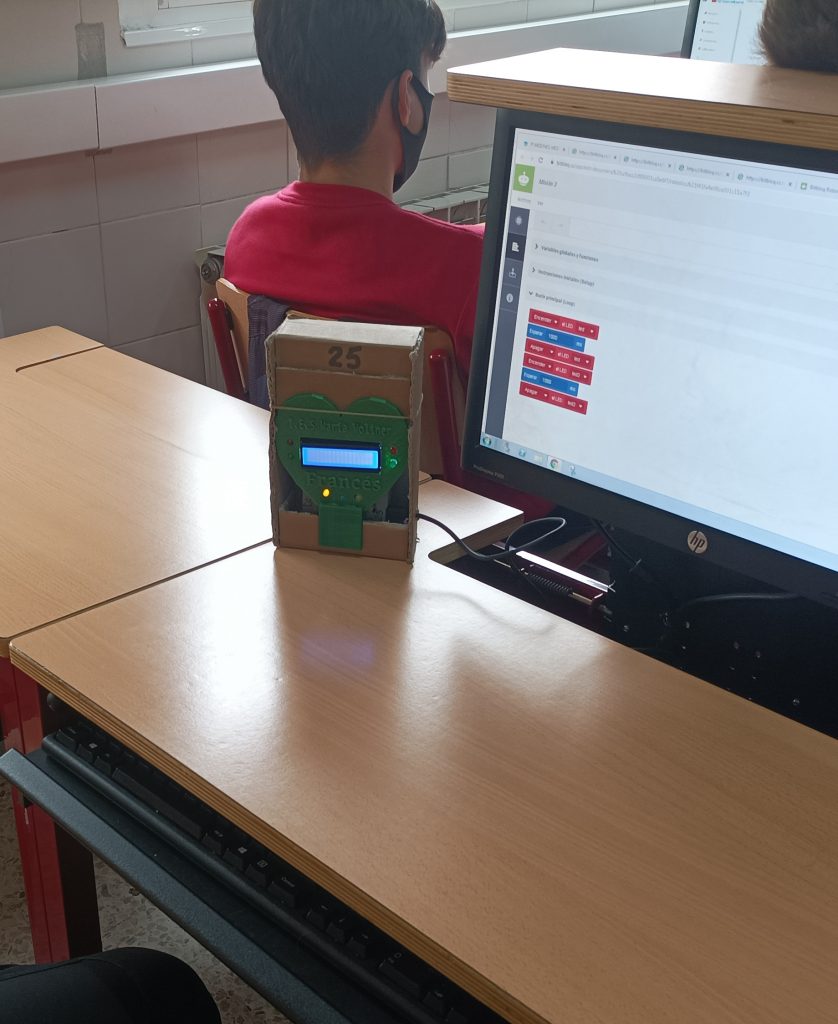
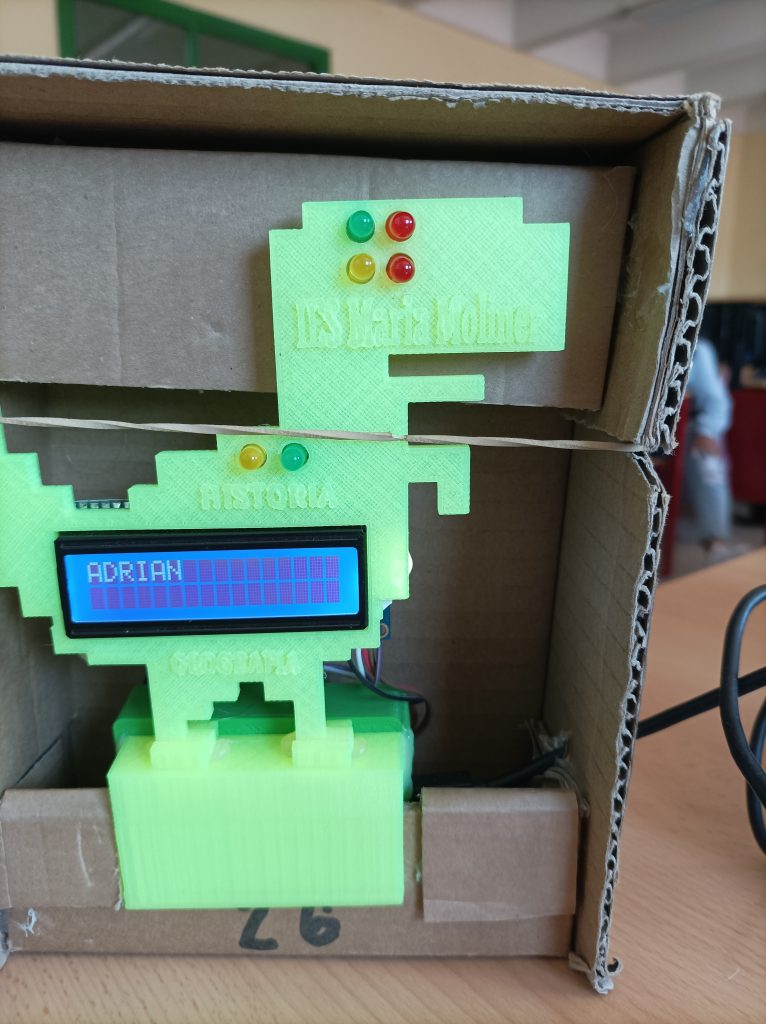
Sesión 6: Registro de la cuenta de Bitbloq y explicación de su funcionamiento. Se reparten las maquetas, que ya tienen montadas y no pueden modificar, se muestra qué es un diodo y continúan las misiones:
MISIÓN 5. SE HIZO LA LUZ. Deben encender un led, da igual cual, durante 5 segundos y luego se debe apagar. No se debe volver a encender.

En la sesión 7 comienza la MISIÓN 6. PARPADEO. Encender y apagar 1 led ininterrumpidamente, con una cadencia de 1 segundo.
MISIÓN 7. PARPADEO DOBLE. Dos leds deben encenderse y apagarse intermitentemente, es decir cuando uno esté encendido el otro estará apagado, y la cadencia será 1 segundo.
MISIÓN 8. BAILE DE LUCES. Realizar una secuencia de luces con mínimo 4 leds y que cumpla lo siguiente en el orden dado: 1. Encender los leds simultáneamente de forma intermitente durante 10 segundos con cadencia 0,5 segundos; 2. Mantenerse apagados durante 3 segundos; 3. Encender de nuevo los diodos y que permanezcan así durante 12 segundos y 4. Apagar los leds durante 2 segundos.
Programarlo de 3 formas diferentes: Misión 8a. Secuencia una sola vez; Misión 8b. Que la repita 4 veces y Misión y 8c. Que se repita por siempre.
En la sesión 8 y, antes de continuar con las misiones, se explica la pantalla LCD.
MISIÓN 9. HOLA. Debe aparecer la palabra “HOLA” en la fila superior del LCD.
MISIÓN 10. MOVEMOS NUESTRO NOMBRE. Mostrar en la pantalla un nombre, y debe moverse de izquierda a derecha de forma continua.
MISIÓN 11. EJERCICIO LIBRE. Crear un programa libre y original, con todos los leds y la pantalla LCD.
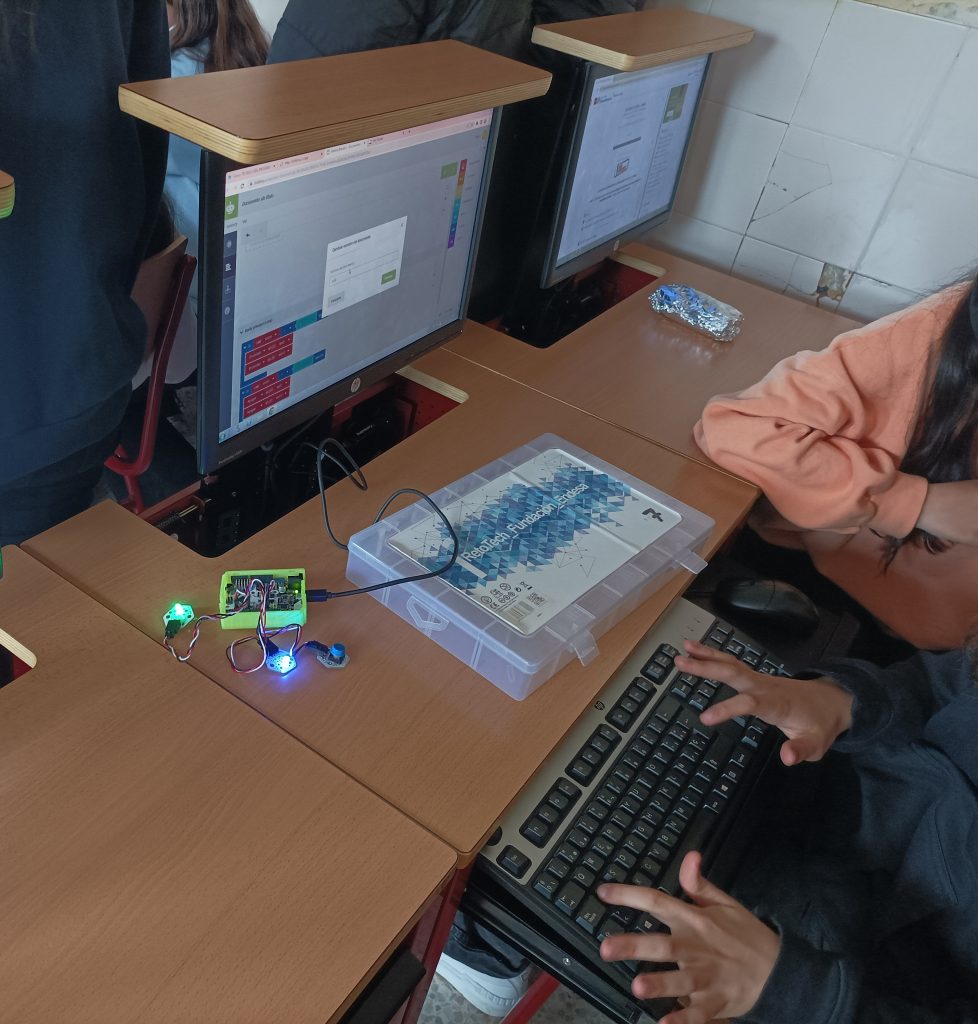
Sesiones 9 – 10: Misiones Zumkit Bq
En la sesión 9, se explica que componentes tiene el kit y cómo funciona el pulsador.

MISIÓN 12. TOMANDO EL CONTROL. Un led se debe encender al presionar el pulsador.

MISIÓN 13. ¿TENÉIS EL CONTROL? Cada vez que se presione el pulsador deben encenderse dos leds de forma intermitente, a los 10 segundos deben apagarse y el programa esperará a que se vuelva a pulsar para encenderse de nuevo.
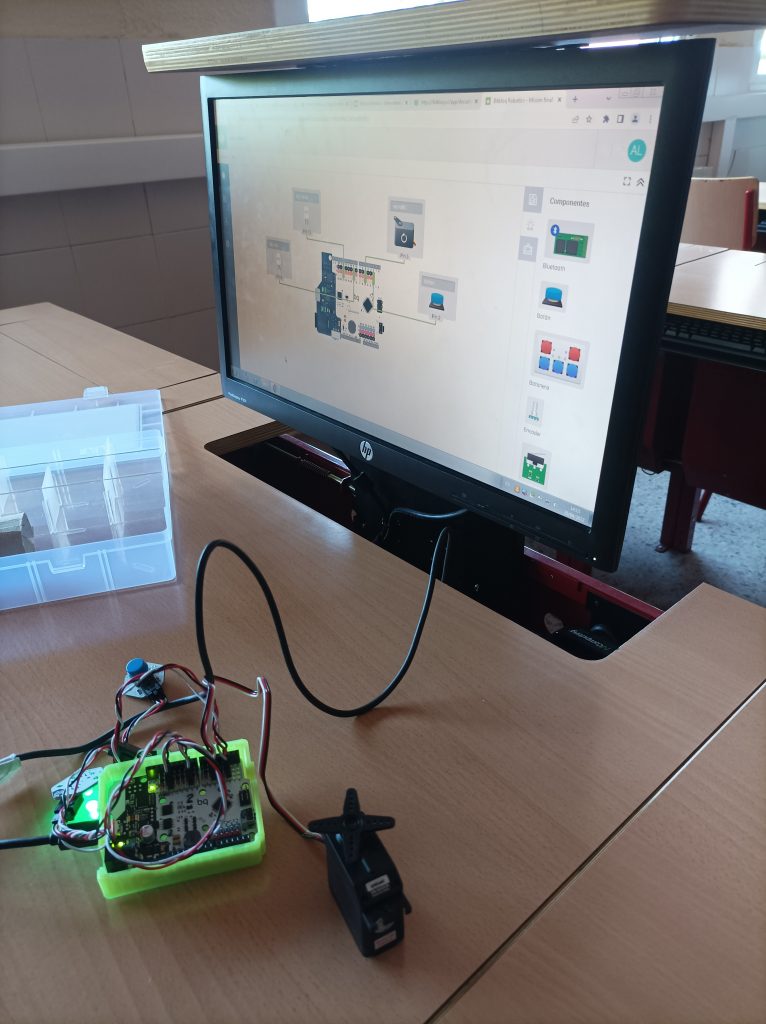
En la sesión 10, se explica el funcionamiento del servo continuo.
MISIÓN 14. ARRANCANDO MOTORES. Realizar un programa para que el servo siempre gire 3 segundos en el sentido de las agujas del reloj, se pare 1 segundo, gire 2 segundos en sentido contrario y se pare 2 segundos.

MISIÓN FINAL. ASEGUREMOS LA SALA. Deben combinar el uso del pulsador, led y servo para dar solución al siguiente problema: “La sala de máquinas de nuestra fábrica es un lugar peligroso y nadie puede entrar mientras están en funcionamiento. Dentro hay un trabajador vigilándolas. Para que nadie entre, hay un cartel en la puerta que indica en qué momento se puede pasar. En algunos momentos del día, para realizar el mantenimiento de las máquinas, el trabajador que está dentro las para, pero no sale, y el que esté fuera esperando deberá saber que en ese momento puede entrar sin peligro. ¿Cómo lo hacemos?, ¿Qué ponemos en las interrogantes del cartel de peligro?”


Ofrecen diferentes soluciones al problema que difieren principalmente en la secuencia de leds que indica si hay peligro, o si el pulsador arranca o para el servo.
Evaluación
La evaluación de esta unidad forma parte de las notas de la evaluación, y con ella se desarrollan diferentes objetivos del curso además de los propios buscados para el tema, además, se puede evaluar la adquisición de todas las competencias clave con ella.
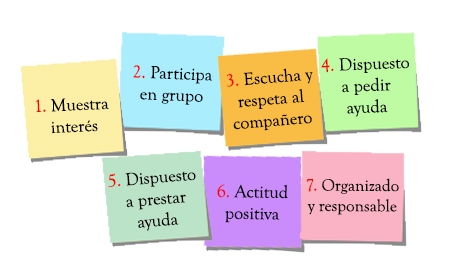
En la primera sesión se explica a los alumnos cómo se va a trabajar y evaluar, indicándoles que, además de superar las diferentes misiones, se evaluará su trabajo con los siguientes indicadores:
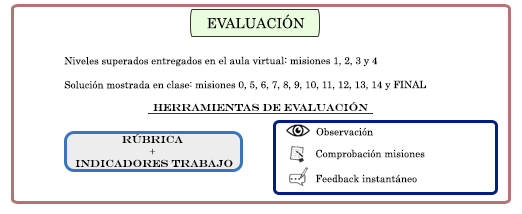
Las misiones se evaluarán con una rúbrica, y para facilitar esta evaluación se recoge información en una lista de cotejo formada por diferentes indicadores que recogen tanto el trabajo individual como grupal, así, mediante observación directa del trabajo de los alumnos, se puede evaluar no solo si consiguen los objetivos marcados sino cómo lo hacen.
Deben entregar la solución de las diferentes misiones en el aula virtual o mostrarlas a la profesora para que les ponga nota y les de acceso a la siguiente.
Con los datos recogidos de la lista de cotejo se evalúa el trabajo individual dentro del grupo mediante la siguiente rúbrica (donde todos los criterios tienen el mismo peso y 10 es siempre, de 9 a 4 algunas veces y pocas veces o nunca de 3 a 0 ): 1. Muestra interés, participa en el grupo 2. Colabora en el trabajo 3. Facilita el trabajo del grupo 4. Escucha a los compañeros/as 4. Aporta ideas 5. Dispuesto/a a pedir ayuda 6. Dispuesto/a a prestar ayuda 7. Organización y responsabilidad.
Para evaluar las misiones se emplea la siguiente rúbrica, en el caso de misiones grupales, la nota obtenida de esta rúbrica va para todos los miembros del equipo: acceso – rúbrica (formato .pdf)
Reflexión sobre las dificultades encontradas y logros obtenidos
Se planteó este trabajo para que los alumnos avanzasen según sus capacidades, ya que facilitaba que, si el grupo terminaba antes de plazo las misiones planificadas para esa sesión, simplemente podían pasar a la siguiente, aunque esta fuese de otra sesión.
Se observó que había diferencia de ritmo de trabajo en las misiones individuales, en ocasiones, alumnos más aventajados ayudaban voluntariamente a los que tenían más dificultades y si no era suficiente las acababan en sus casas, puesto que solo necesitaban más tiempo o un ambiente más relajado de trabajo, ya que este tipo de actividades hace que en el aula haya más jaleo del habitual. Pero una vez empezaban las misiones grupales el ritmo de avance de los grupos de trabajo era más o menos similar.
1. ¿Qué dificultades has encontrado durante la implementación de tu propuesta? ¿Qué ha funcionado mejor?
La implementación ha sido un éxito y esto podría ser debido a que se ha basado en práctica y experimentación, con muy pocos momentos teóricos y con enunciados muy sencillos dejando que desarrollasen su creatividad. Además, eran los propios alumnos quienes pedían ampliar alguna actividad, como paso con la misión 2 y el trabajo del simulador virtual VR.VEX.
Otro aspecto favorable de la propuesta es que, al realizarse una evaluación continua mientras realizaban las misiones y recibir feedback instantáneo, podían mejorar su aprendizaje superando sus dificultades al momento y yo podía ver su evolución y autonomía, observando si habían asimilado los contenidos y adquirían las competencias buscadas.
Como siempre que se realizan actividades de este tipo, donde hay que dar feedback instantáneo a los alumnos, la mayor dificultad para el docente es la gran cantidad de alumnos que hay en aula y a los que hay que atender casi a la vez.
Otra dificultad encontrada ha sido el fallo que se produce al conectar las placas ZumCore a los equipos informáticos, ya que en ocasiones costaba mucho que los mismos las reconociesen perdiendo mucho tiempo de trabajo al tener que pasar los programas de Bitbloq a Arduino para enviarlos a las placas controladoras.
Por último, el inicio del tema, el tener que explicar ellos la teoría, les supuso un rechazo inicial por no estar acostumbrados a realizar este tipo de actividades con exposiciones en público, pero luego lo desarrollaron satisfactoriamente.
2. ¿Qué logros se han alcanzado?
Analizando las actuaciones de los alumnos, su trabajo ha seguido las siguientes fases:
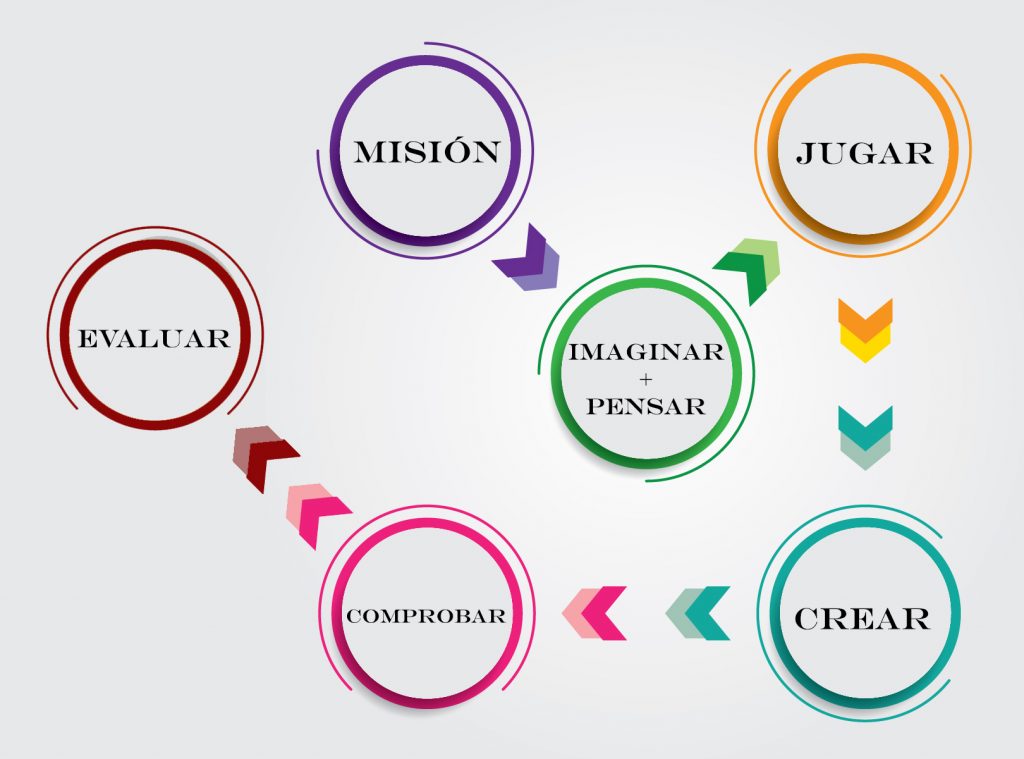
Se ha visto que los alumnos, con el desarrollo de estas fases de trabajo, además de la adquisición de los objetivos y competencias planteados para las diferentes sesiones, han progresado en las siguientes actitudes relacionadas con la resolución de un reto o problema:
- Autonomía y capacidad de resolver problemas del entorno o vida cotidiana para comprender mejor el mundo que les rodea.
- Entusiasmo por aprender.
- Experimentación.
- Creatividad e imaginación.
- Reflexión.
Por otro lado, el trabajo cooperativo, al que no están muy acostumbrados, ha resultado satisfactorio para ellos.
3. ¿Cómo crees que podría mejorar la implementación de la propuesta?
Esta implementación podría mejorarse ampliando el número de sesiones e introduciendo el manejo de más componentes robóticos con más misiones asociadas a ellos, además, con más tiempo se podría haber construido una maqueta que diese solución a la Misión final incrementando su dificultad y enlazándola de manera transversal a las unidades de estructuras y electricidad vistas anteriormente.